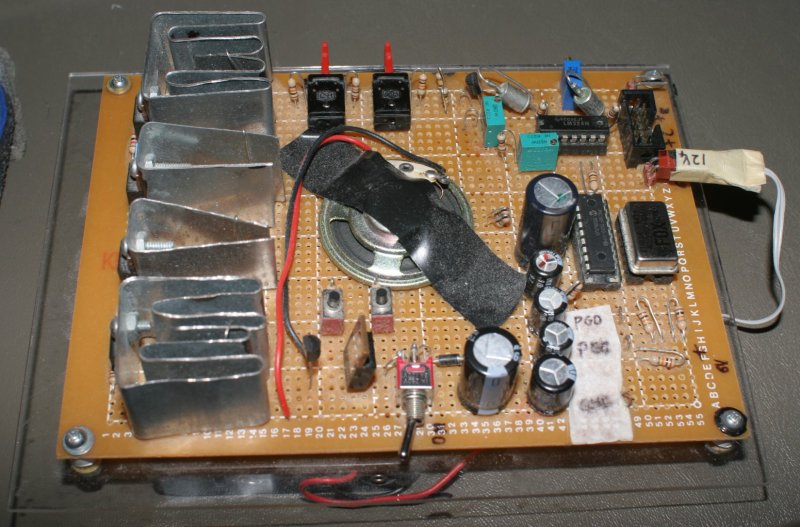
The electronics package supports full speed forward and backward
movement, star tracking movement, and tracking adjustment. It uses
speech synthesis to communicate with the user, allowing you to know the
status while looking through the viewfinder. Take a listen.
The speech synthesis consists of 1 bit audio recordings of 10 digits,
back, in, and out. Most of the microprocessor's 8k of flash
memory contains sound samples. The audio is compressed the same way it
was done on Commodore 64's. The time difference between each crossing
of 0 in the waveform is recorded as 4 bit integers. The microprocessor
inverts the speaker pin after every time difference.
The numbers are mostly samples of MARS HEROINE. 9 came from her
sidekick. 0 came from a documentary about nine hundred eleven, go
figure.
All functions are done by a PIC 18F1320 at 40Mhz. That was more
accidental than intended, since most features were added by discovery,
leading to a much better design if the PIC 18F458 was used. It would
have cost too much to desolder and install a bigger chip every time a
new feature was needed.
Since the corkscrew period is about 7.2 seconds and is coupled directly
to the tachometer, it takes a serious feedback algorithm to hit the
target speed. A directly coupled tachometer on the corkscrew allows
the tachometer to produce the most accurate reading possible. The IR
cutoff sensor is not highpass filtered like most IR sensors. We've had
better luck using a DC LED and calculating a derivative. The
microprocessor waits for a rise of a certain amount. Other delay
counters prevent false positivies.
The servo is pulsed with fairly long pulses to keep it from stalling
yet control speed. Massive capacitance keeps the pulses from
interfering with the tachometer.
With tachometer reading and target speed, the CPU calculates a new
pulse width after every rotation. It takes several revolutions for the
servo to hit the target speed. Mars Heroine says "in" or "out" to
notify you when the target speed is achieved.
The LM324 amplifies the tachometer cutoff sensor and amplifies the
microprocessor signals to the 10V required to switch on the H
bridge.
The drive speed needs adjustment in the field because temperature
variations and assembly differences change the corkscrew reduction
ratio.
2 buttons increment and decriment the drive speed by 1% and the
microprocessor plays prerecorded sounds for each setting. Compared to
an LCD panel, speech synthesis was the cheapest way to display the
current drive speed since it only uses 1 pin.
The AIM switch causes the right ascention arm to move up and down at
full speed. This is mainly used for resetting after an hour of
observations.
The TRACK switch causes it to track using the tachometer.
8 AA batteries provide 12V of power for the servo. Additional current
is bled off to power a lens heater. The lens heater is 4 5 ohm, 5 W
resistors running on 12V. This has been very effective against
condensation.


(C) 1997-2024 Starving, flat broke, usually unemployed Programmers
Hosted all these years by Sourceforge