![]()
Icons for the software were drawn on paper and scanned.
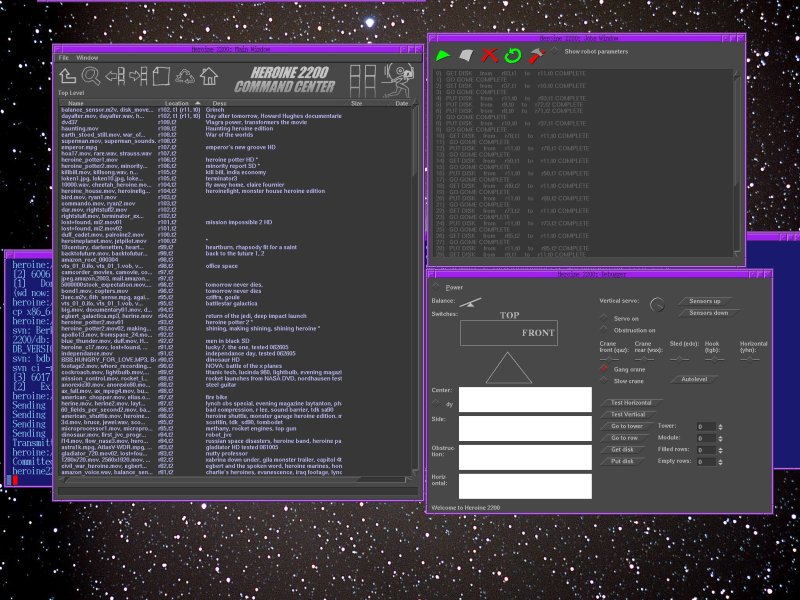
The styling of the user interface constantly reminds you of what you're dealing with.
The software provides a directory view of the DVD library, a list of robot jobs, and a manual control for the robot. The manual control was written before anything else and is still used in the rare case of a glitch.
As disks are stored or retrieved in the database view, robot jobs are automatically piled up to make those changes in real life.
The user commands the robot to perform jobs separately from the database changes. This allows the user to do something else while the robot is running instead of waiting for the robot after every database operation.
The positioning algorithms are not very logical, but instead the culmination of many actions the robot ended up needing to do based on the tower shape. The robot needs to move down a certain way, move up a certain way, nudge down a certain way, pause certain ways. It all evolved out of the physics of fishing line, servos, wood, steel, and aluminum.